 |
High Paying
US Jobs, Economic
Empowerment
&
Revitalization
of
States through Federal Power |
"Critical Field"
Technology Innovation
&
Maximized Profits on
R&D and Investments |
Prevention of Biochemical
and Nuclear Proliferation
&
Homeland Security
Technologies |
Remote Controlled Mine
Detector
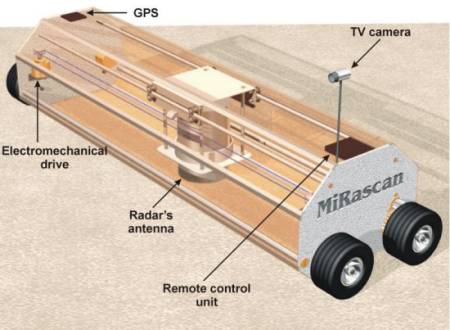
One more variant of device design is the remote control scout
of mine fields. To orientate on terrain and to define coordinates of searching
objects, the self-propelled cart of the radar will be equipped with GPS and TV
camera. Steering of the cart will be carried out with help of a remote control
box. Possible design of the cart with the sensors, which are established on it,
is presented in the Figure.
Wide-span
System for Humanitarian Demining Operations
Introduction.
Our team had
taken an initiative in the development of MiRascan subsurface sounding radar to
enable the operator to detect and identify objects buried under the ground at
low depth (up to 20.0 cm) basing on their shape analysis. The operating
principle of the radar design is based on the method of multi-frequency sounding
of a condensed media (like building structures, grounds, etc.). The method
offered has no counterpart in the world practice so far. (Russians Launch
Anti-Bugging Radar. Microwave Journal, February 1998, Vol. 41, No. 2, pp. 47,
48). The
creators of MiRascan
radar
are Russian Federation Government prize-winners in the field of science and
technology for 1999.
One
of the main problems while liquidating the aftereffects of local conflicts is
mine clearance of the territories that were mined as a result of combat
operations. The special difficulty in the process of humanitarian mine clearance
is presented by the fact that minefields were laid as a rule chaotically,
without compiling proper mine-field records (charts), as well as the fact that
mines with antidisturbance fuses were also installed.
As
a rule, the minefields are combined, which means that they include both antitank
and anti-personnel mines. The major part of the mines has round cross-section
view. The antitank mines have diameter of about 300 mm, and the average diameter
of the anti-personnel mine amounts to 75 mm. Some types of the mines contain
practically no metal, which substantially impedes their detection. In this case
the key give-away factor lies in the blasting charges of the mines, the
dielectric properties of which differ from analogous characteristics of the
ground that covers them. Thus, relative permittivity er
for the typical explosives is between 3.5 and 4.0. At the same time dielectric
properties of the ground in the considered frequency range vary within a wide
range from 2.6 to 25.0, depending on the composition and moisture content of the
ground. The lowest value of the range is related to absolutely dry sand, which
is found in the desert. In the overwhelming majority of cases er
for the ground exceeds the analogous value for the blasting charge.
The
heterogeneities of the surface, as well as a great number of foreign objects in
the ground, especially in the urbanized localities create substantial
difficulties in the mine detection operations. The dielectric contrast of these
heterogeneities with reference to the ground frequently exceeds the contrast of
the plastic-cased mines, which results in an inadmissible level of false alarms.
At the same time, in accordance with the requirements of the UN, the probability
of mine detection should amount to 99.6% at the low level of false alarms. But
these requirements are not met by the existing technical means. Very often the
mine-probing rod and snuffer dogs are the only aids of the sapper.
Description.
The development of the wide
span gears making the most of the spatial filtering to reduce the level of false
alarms is one of the approaches to achieve the set aim. The mock-up of such mine
detector using Russian-made mine detectors of the MMP type in the capacity of
the search elements was designed in late 1980s.
The
new design considers possibilities for the enhancement of efficiency of mine
detection operations that thanks to usage of multifrequency SHF transducers
coupled with metal detector and to generation of the radio images of the terrain
in the lane of movement of a mine detector. An experimental mock-up with the
transducer providing for scanning in two dimensions has been developed, and
algorithms for the representation of information on the display screen in the
form of animated images have been put forward. Proposed methods may find their
use during peacekeeping and humanitarian operations. Fig. 1 presents the
block diagram of the radar MiRascan.
The
scanning in the lateral direction is carried out at the expense of
electromechanical movement of the radar, and in the longitudinal direction due
to the movement of the cart. The scanning results are displayed in the form of
gray scale images on the monitor screen. Since it is difficult for an operator
to perform a simultaneous analysis of all images on different frequencies, one
animated image is formed in which sequential frames correspond to different
frequencies.
The results presented in this paper do not reflect
the obtained experimental information in full body as the MiRaskan display
system is intended for the use of the present-day computer screens and
information from mine detector is displayed as animation.
Possible
design of the cart with the sensors, which
are mounted on it,
is presented in Fig. 5.
The subsurface radar will have five to ten operational frequencies in the
range of 1.5 - 2.0 GHz and transmits unmodulated signals at each frequency.
Its signals are received in two polarizations. Power emitted by the generator on
each frequency is switched in sequence. It amounts up to 10 mW, which provides
for the complete safety of staff. The induction coil of the metal detector will
be located on the butt end of the antenna of the ground penetrating radar, which
provides spatial coincidence of received images from two channels of the mine
detector. Operating frequency of the metal detector will be about 2 MHz, and the
diameter of the induction loop is equal to 120 mm. The successive reception of
signals on each frequency and in both polarizations of GPR and from the metal
detector will be conducted in the process of scanning the ground surface. The
frequency switching rate is such that it provides for the spatial matching for
all radio images of the GPR separate frequencies and metal detector image.
The
scanning results will be displayed in the form of gray scale images on the
monitor screen for both channels. Since it is difficult for an operator to
perform a simultaneous analysis of all images on different frequencies of GPR,
one animated image will be formed in which sequential frames correspond to
different frequencies. We shall have only one picture for the metal detector
channel. The size of images in the lateral direction corresponds to scanning
range of searching antenna, and in the longitudinal direction the length of the
covered distance in the sweep defines the image.
To orientate
on terrain and to define coordinates of searching objects, the self-propelled
cart of the radar will be equipped with GPS and TV camera. Steering
of the cart will be carried out with help of a remote control box.